
Cvičení 1 - Praktické seznámení s UAV
Úvodní cvičení je určeno k prvotnímu fyzickému seznámení se s vybranými bezpilotními leteckými prostředky (UAV, angl. Unmanned Air Vehicle).
Cíle cvičení
- seznámit se s jednotlivými zařízeními potřebnými pro provoz UAV (bezpilotní systém, UAS)
- seznámit se s existujícími typy konstrukcí UAV
- seznámit se s jednotlivými subsystémy UAV a jejich charakteristikou
- seznámit se se softwarovými aplikacemi pro ovládání UAV
Obsah cvičení
Bezpilotní systém
Ačkoliv některé běžně dostupné bezpilotní letecké prostředky je možné ovládat pouhými gesty rukou či těla (viz např. https://www.youtube.com/watch?v=7uQC1mH4x4E), v drtivé většině případů jsou provozovány s využitím dalších technických zařízení. Bezpilotním systémem (Unmanned Air System, UAS) je proto rozuměn "systém skládající se z bezpilotního letadla, řídicí stanice a jakéhokoliv dalšího prvku nezbytného k umožnění letu, jako například komunikačního spojení a zařízení pro vypuštění a návrat" (citace z Doplňku X leteckého předpisu L 2).
V typické konfiguraci tak UAS tvoří a, samotné UAV; b, zařízení zajišťující fyzické ovládání letu UAV a celkovou komunikaci s ním (ovladač); c, mobilní zařízení pro správu UAS (zobrazování informací o UAV, nastavování parametrů letu či snímkování, atd.). Mobilním zařízením je typicky samostatný tablet či mobilní telefon s nainstalovanou aplikací dodávanou výrobcem UAV (DJI GO, senseFly eMotion, apod.), může se také ale jednat o vestavěnou součást ovladače. Ačkoliv je některé UAS tvořené všemi třemi uvedenými součástmi možné ovládat pouze s využitím ovladače (tedy bez mobilního zařízení s dedikovanou aplikací), tuto variantu obecně není možno z bezpečnostních důvodů doporučit.
V případě UAS určených pro (polo)autonomní létání (typicky konstrukce typu křídlo) nemusí být vůbec k dispozici klasický ovladač pro řízení UAV za letu. UAS se pak skládá ze samotného UAV, mobilního zařízení a zařízení zajišťujícího komunikaci mezi nimi. Pilot pak má možnost zasahovat do letu UAV pouze pomocí určité předprogamované sady funkcí (např. okamžité zahájení přistání či návratu domů, zahájení náhlého stoupání či klesání).
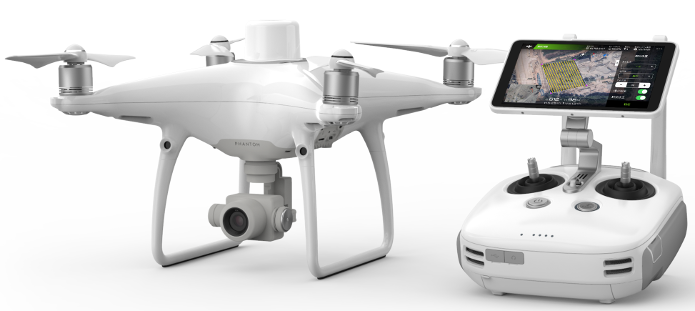
Obr. 1: Ukázka bezpilotního systému pro provoz UAV DJI Phantom 4 RTK - samotné UAV, ovladač, mobilní telefon. Zdroj: https://www.dji.com/cz/phantom-4-rtk
Typy konstrukcí UAV
V současnosti existují dva základní typy konstrukcí bezpilotních leteckých prostředků (UAV) využívané pro sběr prostorových dat či přidružené aplikace. Jedná se o 1, vrtulníky a koptéry a 2, letouny (křídla).
Jednoduše řečeno, vrtulníky a koptéry nejsou vybaveny klasickými křídly, jejich pohyb zajišťuje dva a více rotorů (většinou sudý počet, kdy například zařízení se čtyřmi rotory označujeme pojmem kvadrokoptéra, se šesti rotory hexakoptéra, s osmi rotory oktokoptéra, atd.). Základními výhodami těchto typů UAV je schopnost kolmého vzletu a přistání, schopnost letu na místě a výborné manévrovací schopnosti. S jejich pomocí je tak možné realizovat i detailní inspekci a monitoring různých typů objektů.
Letounem (křídlem) je myšleno UAV vybavené pevnými křídly, mnohdy vizuálně vypadající jako klasické letadlo. Díky výrazně lepším aerodynamickým vlastnostem jsou zařízení této konstrukce typicky schopna létat po delší dobu a většími rychlostmi, což umožňuje nasnímat i oblasti s větší rozlohou. Jejich výhodou je také celkově jednodušší konstrukce a naopak nevýhodou typicky možnost pořizovat pouze snímky s kolmou osou záběru nebo nutnost existence vhodné plochy pro přistání (start).
Na trhu se ojediněle objevují i UAV hybridní konstrukce, které kombinují výhody obou základních typů konstrukcí. Umožňují tedy vertikální vzlet a přistání, či let na místě, ale zároveň jsou vybaveny pevnými křídly.

Obr. 2: Hexakoptéra DJI Matrice 600 Pro (vlevo), křídlo senseFly eBee Plus RTK (vpravo).
Subsystémy UAV
Každé UAV se skládá z několika samostatných částí (subsystémů) tvořících následně funkční celek. Mezi základní subsystémy patří:
- samotná konstrukce UAV - obvykle vyrobená z plastu, polystyrenu, různých kompozitních materiálů, atd.
- řídící subsystém - řídící jednotka (palubní počítač), černá skříňka
- pohonný subsystém - motory, regulátory motorů, vrtule, baterie
- komunikační subsystém - vysílač a přijímač s anténami, obvyklé je využití frekvencí 2.4 GHz, 5.8 GHz (Wi-Fi)
- subsystém orientace a navigace - kompas, GNSS přijímač, IMU jednotka (inerciální navigace), barometr, antikolizní systém
- sensor - dle požadavku na pořizovaná data (RGB kamera, multi/hyperspektrální kamera, termální kamera, LiDAR), sensor je typicky umístěn ve stabilizovaném gimbal závěsu
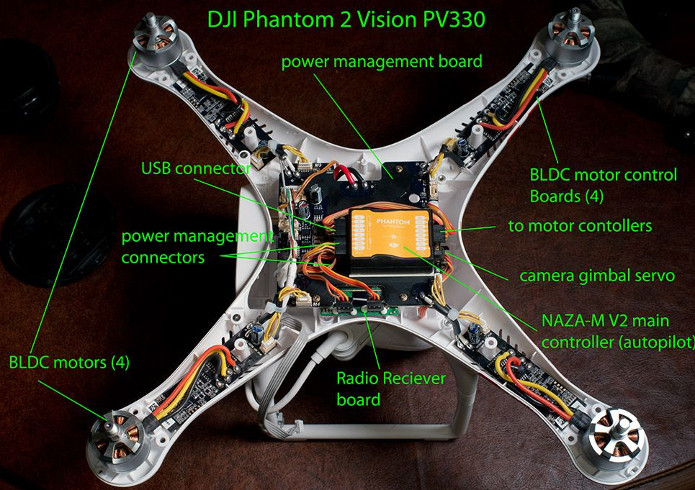
Obr. 3: Elektronika kvadrokoptéry DJI Phantom 2. Zdroj: https://cz.pinterest.com/pin/388646642818790774/
Softwarové aplikace pro ovládání UAV
Pro ovládání UAV jsou standardně využívány softwarové aplikace dodávané samotnými výrobci UAV. Ačkoliv se jednotlivé aplikace mezi sebou liší, v zásadě poskytují následující funkcionalitu:
- provedení předletové přípravy (kontrola funkčnosti jednotlivých subsystémů UAV, provedení nastavení či kalibrace vybraných součástí UAV, nastavení fail-safe systému)
- příprava letecké mise (výběr trasy a parametrů letu, nastavení kamery, jejího závěsu a parametrů snímkování)
- komunikace mezi pilotem a strojem (přenos telemetrických údajů z UAV, přenos obrazu ze sensoru UAV, přenos údajů o stavu UAV, přenos příkazů pro provedení či koordinaci letu)
- realizace letu (využití inteligentních letových módů, případně autonomního letu, pořizování obrazových záznamů, zobrazení aktuální polohy UAV nad mapovým podkladem)
- správa UAV (aktualizace firmware, kontrola funkčnosti, vedení statistik o realizovaných letech)
Jelikož ve výuce tohoto předmětu budou využívány UAV společností DJI a senseFly, jsou zde rámcově představeny softwarové aplikace pro ovládání UAV těchto dvou výrobců:
- DJI GO 4 (DJI GO pro starší UAV): slouží k přípravě a realizaci manuálního letu s UAV společnosti DJI. Umožňuje realizovat veškeré nastavení UAV, zajišťuje online přenos živého náhledu obrazu z kamery, disponuje několika inteligentními leteckými módy. Aplikace je dostupná pro operační systémy (OS) Android a iOS.
- DJI GS Pro: slouží k plánování a realizaci (polo)autonomního letu s UAV společnosti DJI. Je tedy vysoce vhodná pro fotogrammetrický sběr dat - umožňuje uživateli nastavit požadované parametry (podélný a příčný překryv, výška letu, apod.) a podle nich automaticky realizovat sběr dat. Velkou nevýhodou aplikace je nemožnost ukládání snímků v nekomprimovaném formátu RAW. Aplikace je dostupná pro OS Android a iOS. Obdobnou funkcionalitu nabízí i aplikace třetích stran, např. Pix4D Capture, PrecisionFlight, Litschi, UgCS.
- sensFly eMotion: slouží k plánování a realizaci (polo)autonomního letu s UAV společnosti senseFly. Při plánování zohledňuje reliéf terénu díky globálnímu digitálnímu modelu reliéfu (ten je možné nahradit svým vlastním přesnějším modelem), umožňuje vestavěnými příkazy UAV ovládat během letu a pro UAV vybavené RTK GNSS přijímači slouží také k vytvoření RTK řešení či k realizaci post-processing zpracování GNSS observací. Pro výukové účely je možné prakticky veškerou funkcionalitu vyzkoušet v módu simulátoru. SW je dostupný pro OS Microsoft Windows.

Obr. 4: Ukázka prostředí aplikace DJI GO. Zdroj: https://www.dji.com/cz/zenmuse-x5r
Publikace a jiné informační zdroje
- Řízení letového provozu ČR, Doplněk X leteckého předpisu L 2, dostupné z: https://aim.rlp.cz/predpisy/predpisy/dokumenty/L/L-2/index.htm
- Karas, J. a Tichý, T.: DRONY, Computer Press, Brno, 2016
- Kocourek, J. a Řešátko, J.: DRONY, praktická příručka pro majitele dronů DJI, Telink, 2017
- Oficiální web společnosti DJI
- Oficiální web společnosti senseFly