
Cvičení 10 - Georeferencování pomocí techniky PPK, zpracování termálních snímků
Cvičení je tematicky rozděleno do dvou samostatných částí. V první je realizováno přesné georeferencování snímků pořízených pevným křídlem senseFLY eBee vybaveným GNSS RTK jednotkou v prostředí software eMotion. Druhá část je věnována problematice tvorby ortorektifikované mozaiky termálních snímků.
Cíle cvičení
- naučit se georeferencovat snímky z UAV technikou PPK,
- seznámit se prakticky s problematikou zpracování termálních snímků.
Úkoly
- pomocí techniky PPK georeferencujte snímky pořízené pevným křídlem senseFLY eBee RTK,
- odvoďte ortorektifikovanou mozaiku pro termální snímky.
Soubory pro cvičení
Veškerá potřebná data naleznete na síťovém uložišti \\adelka-nas.vsb.cz\Public v adresáři UAV_GIS\Cviceni10.
Obsah cvičení
Georeferencování technikou PPK v prostředí software eMotion
Ve cvičení 4) bylo realizováno manuální georeferencování RGB snímků pořízených kvadrokoptérou na základě signalizovaných pozemních vlícovacích terčů zaměřených technikou GNSS RTK. Tento proces manuálního georeferencování je časově poměrně náročný nejen při zpracování snímků, ale také při jejich samotném sběru - vlícovací terče musí být na lokalitě před letem rozmístěny, jejich poloha zaměřena, a po letu opět sesbírány. Časově výrazně efektivnější proto může být využití UAV vybaveného GNSS přijímačem schopným určit jeho polohu s vysokou přesností v průběhu samotného letu či následně po něm, a tím i určit polohu místa vyhotovení každého snímku s touto přesností.
K popsanému účelu jsou dnešní UAV vybavovány GNSS přijímači schopnými realizovat kódová i fázová měření obvykle na více než jedné frekvenci. Ve specifikacích UAV jsou tyto přijímače obvykle jednoduše označovány jako GNSS RTK přijímače. Je nutno podotknout, že implementace takovéhoto GNSS přijímače do UAV výrazně zvyšuje jeho cenu - například cena oblíbené kvadrokoptéry společnosti DJI Phantom 4 se standardním GNSS přijímačem byla v době její distribuce okolo 40 tis. Kč, zatímco identický stroj s GNSS RTK přijímačem stojí přibližně 150 tis. Kč.
Dosáhnout vysoké přesnosti určení polohy stroje a/nebo jeho sensoru v řádu centimetrů je možné buďto přímo během samotného letu UAV, či až po jeho ukončení. První přístup je typicky realizován pomocí techniky RTK (Real-Time Kinematic) a vyžaduje kontinuální připojení ke zdroji korekcí prostřednictvím mobilního internetu či rádiové komunikace. Význam těchto korekcí je vysvětlen dále v textu. Druhý přístup je realizován obvykle pomocí techniky PPK (Precise Point Kinematic), kdy ke zpřesnění polohy UAV a/nebo jeho sensoru dochází až po letu samotném zpracováním surových dat z GNSS RTK přijímače. Oba dva uvedené přístupy jsou ve většině případů založeny na diferenčních technikách GNSS vyžadujících dvojici přijímačů - prvním z nich je pohybující se přijímač, jehož polohu určujeme (tzv. rover), v našem případě se jedná o použité UAV. Druhým pak statický přijímač umístěný na bodě o známých souřadnicích (tzv. base). Jako base můžeme použít buďto existující GNSS referenční stanici, či si ji sami dočasně vybudovat v místě měření - pokud k tomu máme odpovídající hardware. Přijímač označovaný jako base může díky znalosti vlastní polohy sloužit k určení tzv. korekcí, které rover použije k opravě své vlastní polohy. Více informací o diferenčních GNSS technikách je možno nalézt například v Vojtek (2014).
V tomto cvičení jsou pomocí techniky PPK georeferencovány RGB snímky pořízené pevným křídlem senseFLY eBee RTK, a to v prostředí software eMotion představeného ve cvičení 9. Pro tuto operaci je potřeba mít následující vstupy:
- snímky pořízené RGB kamerou, které budou georeferencovány,
- log soubor se záznamem letu z pevného křídla senseFLY eBee RTK obsahující mimo jiné surové observace jeho GNSS přijímače, jedná se o soubor s příponou bb3,
- surové observace z GNSS referenční stanice VSBO z doby letu UAV, ve formátu RINEX,
- přesné poloha GNSS referenční stanice VSBO, dostupné zde.
Proces georeferencování snímků technikou PPK v prostředí software eMotion je možno spustit na záložce Postflight zobrazené v levé hlavní liště. Pakliže zařízení, na kterém georeferencování proběhne, nebylo použito i k samotnému letu s UAV, nezbývá než v prvotním okně zvolit možnost No u volby Did you use this computer to fly? a založit si na vybraném místu na disku zařízení nový projekt. V dalším okně načteme log soubor se záznamem letu z pevného křídla (položka Drone Flight Log). Po jeho načtení je na zobrazeném okně potřeba vybrat v rozbalovacím seznamu volbu PPK: Process drone's raw GNSS data a níže nastavit cestu k observačním a navigačním souborům z GNSS referenční stanice VSBO a také informace o její poloze a typu použité antény přijímače. Ukázka nastavení těchto parametrů je na obrázku č. 1.
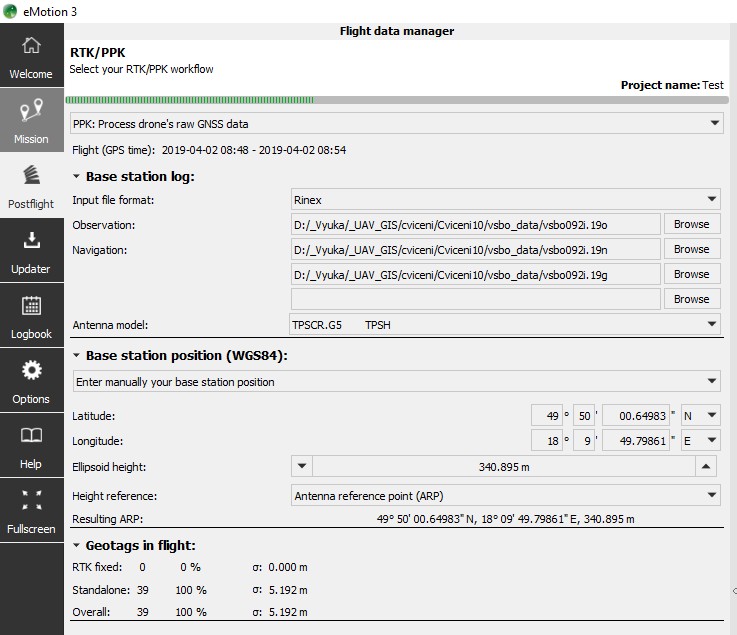
Obr. 1: Nastavení parametrů GNSS referenční stanice VSBO při georeferencování technikou PPK.
Pokud si observace z přijímače UAV a přijímače base časově odpovídají (rozuměj pocházejí ze stejného dne, hodiny, atd.), dochází následně k vypočtení zpřesněné trasy letu UAV včetně polohy míst, kde UAV pořizovalo jednotlivé snímky. Software eMotion po tomto kroku ukazuje formální přesnost polohy míst pořízení snímků před a po jejich zpřesnění - hodnoty před zpřesněním (Standalone) se budou pohybovat v řádu několika metrů, ty po zpřesnění (PPK fixed) by měly být v řádu prvních centimetrů. Tyto hodnoty je potřeba brát pouze jako informativní, skutečná přesnot určení polohy může být o něco lepší, ale také horší a rozhoduje o ní celá řada parametrů (například vzájemná vzdálenost base a rover, kvalita observačních dat z obou přijímačů, aktuální stav atmosféry, atd.).
Aby byla zpřesněná poloha zapsána i do souborů se samotnými snímky pořízenými UAV, je potřeba v dalších krocích zadat cestu k nim a nechat tuto operaci provést. Kromě ní je možné nechat software eMotion automaticky vytvořit také textový soubor obsahující polohu jednotlivých snímků, KML (JSON) soubor se záznamem trajektorie letu UAV či projekty pro návazné zpracování snímků v softwarech Pix4D, Trimble či Agisoft Metashape.
Poznámka: přesná poloha není zapisovaná do originálních snímků vstupujících do procesu georeferencování, software vytváří vlastní kopii snímků v adresáři projektu georeferencování a originální snímky tím zachovává netknuté.
Bližší informace o přesném georeferencování snímků pořízených pevnými křídly společnosti senseFLY s využitím technik RTK či PPK a jeho konkrétní ukázky jsou k dispozici například v tomto videu společnosti senseFLY: https://www.youtube.com/watch?v=1A3ZmYwx330.
Publikace a jiné informační zdroje
- youtube kanál senseFLY Academy
- Vojtek, D. Globální navigační a polohové systémy. Učební texty, VŠB-TUO, 2014, dostupné zde