
Cvičení 9 - Pořízení snímků pevným křídlem
Ve Cvičení 3 byly popsány postupy vedoucí k přípravě UAV k letu a k bezpečnému provedení letu kvadrokoptérou. Účelem tohoto cvičení je poskytnout informace a praktickou zkušenost k přípravě a realizaci letu pevným křídlem. Zásadním rozdílem realizace letu se současnými pevnými křídly oproti kvadrokoptérám je to, že let je téměř výhradně realizován v polo-autonomním režimu. Tedy UAV se samostatně pohybuje po předem určené trase, pilot jej manuálně neřídí, má však možnost kdykoliv zasáhnout do průběhu letu či jej ukončit.
První část cvičení probíhá na počítačové učebně, kdy si každý student vyzkouší přípravu a realizaci letu s pevným křídlem na simulátoru. Druhá část cvičení již probíhá v terénu, kdy je let s pevným křídlem fyzicky realizován.
Cíle cvičení
- naplánovat si samostatně letovou misi v simulátoru dostupném v software eMotion,
- získat praktickou zkušenost s přípravou a realizací letu s pevným křídlem (polo-autonomní let).
Úkoly
- naplánujte snímkovací misi v prostředí software eMotion a realizujte ji v módu simulátoru,
- realizujte pořízení RGB a termálních snímků pevným křídlem senseFLY eBee RTK.
Obsah cvičení
Příprava mise v prostředí eMotion
Lety s pevnými křídly společnosti senseFLY jsou realizovány prostřednictvím software eMotion (https://www.sensefly.com/software/emotion/) určeného pouze pro operační systémy Microsoft Windows. Software slouží také pro plánování a přípravu letové mise, jako simulátor realizace letu s UAV, pro export výstupů z letu a snímkování či pro přesné georeferencování pořízených snímků technikou D-GNSS post-processing (viz Cvičení 10). Jde tedy o komplexní řešení, kdy jeden software slouží pro veškeré úkony spojené s provozem UAV uvedené společnosti.
Při spuštění software eMotion volíme vlevo nahoře nabídku Mission a zakládáme novou misi pro vybraný stroj a sensor. V našem případě se bude jednat o stroj eBee RTK a RGB kameru S.O.D.A. a následně termální kameru thermoMAP. Po založení mise se nám zobrazí okno s mapovým podkladem a v levé části několik záložek sloužících pro naplánování letové mise.
První záložka zleva Briefing slouží k definování pracovní oblasti, ve které se bude pevné křídlo během mise pohybovat. Oblast má tvar válce definovaném pomocí jeho poloměru (parametr Radius), výšky (parametr Ceiling) a středem jeho podstavy (souřadnice v parametru Centre). Veškerý pohyb UAV během jeho letu musí být realizován uvnitř této pracovní oblasti. Dále je na záložce Briefing možno nastavit očekávanou rychlost a směru větru v průběhu realizace letu. Pokud ji uživatel nezná, je k dispozici předpověď počasí na vybrané dny stahovaná z numerického předpovědního modelu počasí.
Na další záložce (Take off and landing) uživatel nastavuje parametry pro start UAV (místo startu, letová výška, do které má UAV po startu bezodkladně nastoupat) a přistání UAV (místo přistání, způsob přistání, letová výška, ve které zahájí UAV přistávací manévr). Startovat a přistávat by pevné křídlo eBee mělo proti směru větru.
Třetí záložka zleva Mission blocks slouží ke specifikování oblasti, ve které bude probíhat snímkování, a základních parametrů snímkování (typ sensoru, požadované rozlišení snímků, podélný a příčný překryv snímků). Těchto oblastí může být v rámci jedné mise specifikováno více.
Důležitá poznámka: aby bylo snímkování ve specifikované oblasti při letu UAV opravdu realizováno, je potřeba jej stroji přiřadit tlačítkem Assign this block to a drone (tlačítko s ikonou pevného křídla vpravo nahoře) v záložce Mission blocks.
Další záložka v pořadí (Safety parameters) umožňuje uživateli nastavit sadu parametrů souvisejících s bezpečností letu. Zejména se jedná o parametry spojené s fail-safe funkcí návratu stroje na zadanou pozici, tzv. home point, v případě nenadálé situace.
Záložka Drone and camera selection slouží k případné změně použitého typu pevného křídla a sensoru.
Poslední záložka Set-up RTK se zobrazuje pouze pokud je vybrán typ pevného křídla vybavený přesným GNSS RTK přijímačem a pevné křídlo je připojeno k zařízení, na kterém běží software eMotion, či je spuštěn simulátor letu. Tato záložka slouží k nastavení parametrů připojení ke zdroji online RTK korekcí. Pokud takovéto připojení není v lokalitě realizace letu k dispozici, může pevné křídlo během letu ukládat surové observace z GNSS přijímače a pořízené snímky mohou být přesně georeferencovány následným post-processing zpracováním (viz Cvičení 10).
Celý postup plánování letové mise v software eMotion je názorně shrnut například v tomto videu společnosti senseFLY: https://www.youtube.com/watch?v=JxClOEHdZEo.
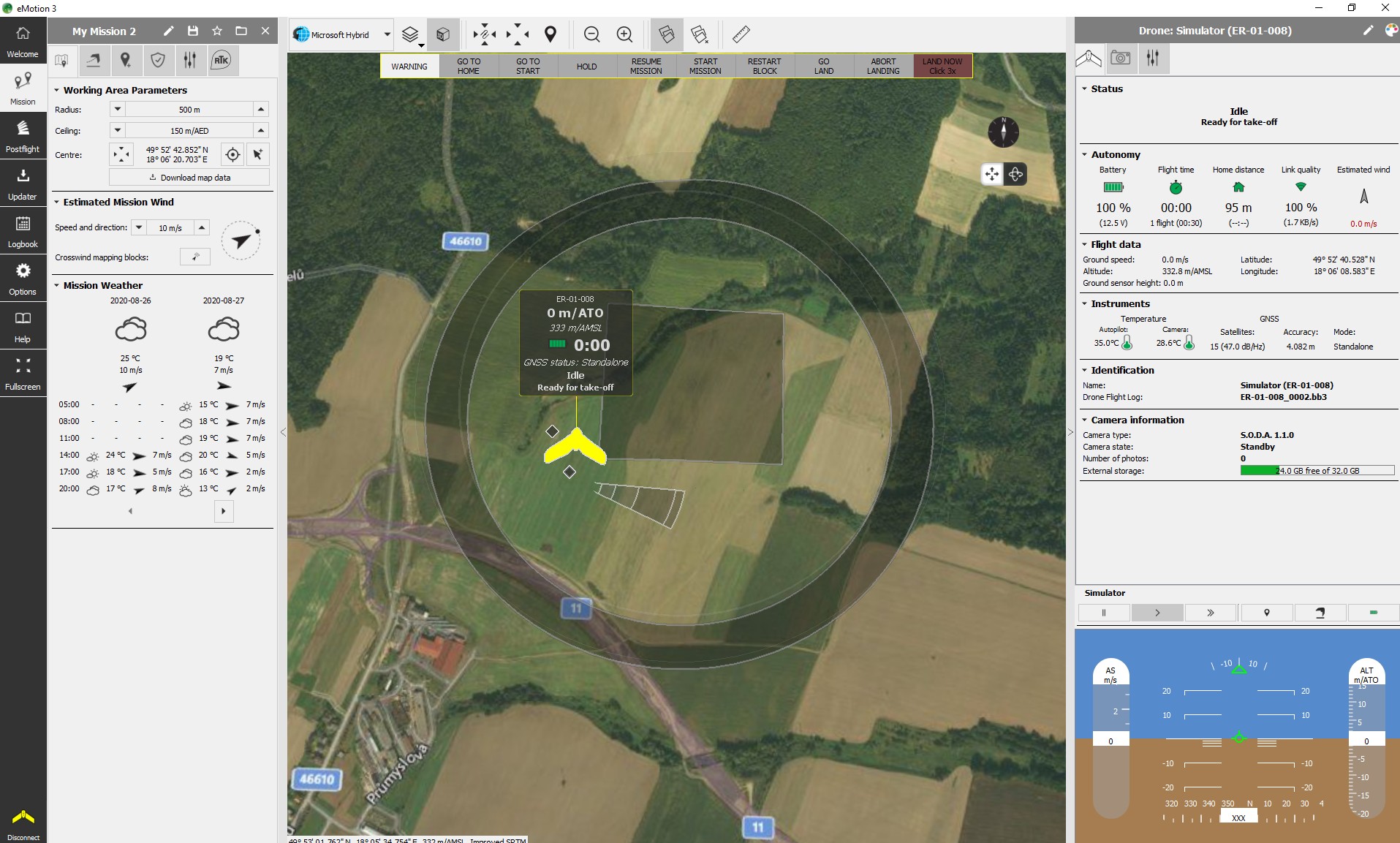
Obr. 1: Prostředí software eMotion. Vlevo záložky pro přípravu letové mise, uprostřed mapa se zobrazením letové mise, vpravo okno fyzicky připojeného UAV či simulátoru letu s UAV.
Simulátor letu v prostředí eMotion
Ve chvíli, kdy uživatel naplánuje letovou misi, je možno ji realizovat. Nejprve je nutné stisknout tlačítko Connect v levém dolním rohu pracovního okna eMotion, které slouží k připojení se ke stroji. Připojit se a realizovat let je možno buďto s fyzickým pevným křídlem (volba Connect to your dron ve vyvolaném okně) či v módu simulátoru (volba Start a simulation). V obou případech je uživateli zobrazováno identické pracovní okno s identickými možnostmi nastavení a ovládáním pevného křídla. Z tohoto důvodu zde popsané informace jsou platné pro let realizovaný s fyzickým pevným křídlem i pro let realizovaný v prostředí simulátoru.
Po připojení je možno na první záložce Flight monitoring vidět status a základní parametry pevného křídla jako je například jeho poloha, stav nabití baterie, vzdálenost od home pointu, aktuální síla větru nebo kvalita spojení mezi UAV a vysílačem připojeným k zařízení, na kterém běží software eMotion.
Druhá záložka Camera slouží k nastavení sensoru použitého pro sběr dat (formát snímků - JPEG či JPEG+RAW, expoziční čas, maximální citlivost ISO, korekce expozice, vyvážení bílé) a k vyzkoušení provozu sensoru vyhotovením testovacího snímku. Na poslední záložce Parameters jsou zobrazeny obecné informace o připojeném pevném křídle a možnost nastavit mód manuálního letu.
Poznámka: pokud je let realizován v módu simulátoru s využitím pevného křídla vybaveného přesným GNSS RTK přijímačem, je potřeba buďto nastavit připojení k online RTK korekcím, či vybrat volbu Standalone (bez použití online RTK korekcí) v záložce Set-up RTK - viz výše v textu.
Zahájit let v módu simulátoru může uživatel stisknutím tlačítka Simulate the take-off na liště Simulator. Tlačítko je ve tvaru dronu letícího nad rovinou. Po stisknutí tlačítka pevné křídlo odstartuje ze zvolené pozice, nastoupá do požadované výšky a dle nastavení buď kroužením nad místem vzletu čeká na uživatelovy další pokyny či automaticky začíná se snímkováním.
V průběhu letu lze pevnému křídlu posílat pokyny pomocí tlačítek v šedé liště v horní části pracovního okna softwaru eMotion. Lze jimi například zahájit či přerušit proces snímkování ve specifikované oblasti, nechat křídlo kroužit nad aktuální pozicí, náhle nastoupat či klesnout, nebo přistát na home pointu či okamžitě nad aktuálním místem, kde se pohybuje.
Ukázka realizace letu s pevným křídlem senseFLY eBee v simulátoru v software eMotion je k dispozici například v tomto videu společnosti senseFLY: https://www.youtube.com/watch?v=IvRoEwR6K_I.
Příprava UAV k letu
Celý proces přípravy letu se řídí postupy popsanými v části Příprava UAV k letu ve Cvičení 3.
Fyzická příprava pevného křídla senseFLY eBee k letu je k vidění například v tomto videu společnosti senseFLY: https://www.youtube.com/watch?v=jBgrxB6-pj4.
Realizace letu s fyzickým pevným křídlem
Nastavení spojené s realizací letu a možnosti pilota zasáhnout do průběhu letu pevného křídla byly již výše popsány v části Simulátor letu v prostředí eMotion. V této části je proto zmíněn již jen specifický proces startu a přistání pevného křídla senseFLY eBee.
Start pevného křídla senseFLY eBee probíhá jeho vyhozením do vzduchu pilotem a následným automatickým nastoupáním UAV do letové výšky specifikované pro danou misi. Pro nastartování motoru je potřeba, aby pilot pevným křídlem třikrát rychle za sebou zahýbal směrem od sebe a k sobě. Následně pilot několik sekund čeká na rozsvícení stavové diody stroje stálou zelenou barvou a roztočení motoru do vysokých otáček a pevné křídlo odhazuje do vzduchu směrem od sebe přibližně pod úhlem 45 °.
Přistávací manévr pevného křídla senseFLY eBee spočívá v jeho nalétnutí na přistávací koridor specifikovaný pro danou misi v určité letové výšce a následném postupném sklesávání. Ve chvíli, kdy je pevné křídlo ve výšce okolo 1 až 2 metrů nad zemským povrchem, vypíná motor a padá k zemi. Pro přistání je proto potřeba vybírat rovinaté a nečlenité plochy, ideální jsou porosty s nízkou vegetací (louka, pastvina), neosázená pole, apod. Během přistání může dojít k odpadnutí nasazovacích křídel stroje, v horších případech k poškození jeho těla či křídel o různém rozsahu.
Ukázka startu s pevným křídlem senseFLY eBee včetně doporučení je k dispozici například v tomto videu společnosti senseFLY: https://www.youtube.com/watch?v=z5Z0PMENSUY.
Ukázka přistání pevného křídla senseFLY eBee je k dispozici například v tomto videu společnosti senseFLY: https://www.youtube.com/watch?v=_9o2zZMSXOw.
Po ukončení letu
Celý proces kroků realizovaných po přistání UAV se řídí postupy popsanými v části Po ukončení letu ve Cvičení 3.
Publikace a jiné informační zdroje
- youtube kanál senseFLY Academy
- Bezpečnostní vzdělávací kampaň Úřadu pro civilní letectví (ÚCL) k provozu UAV
- Řízení letového provozu ČR, Doplněk X leteckého předpisu L 2, dostupné z: https://aim.rlp.cz/predpisy/predpisy/dokumenty/L/L-2/index.htm